

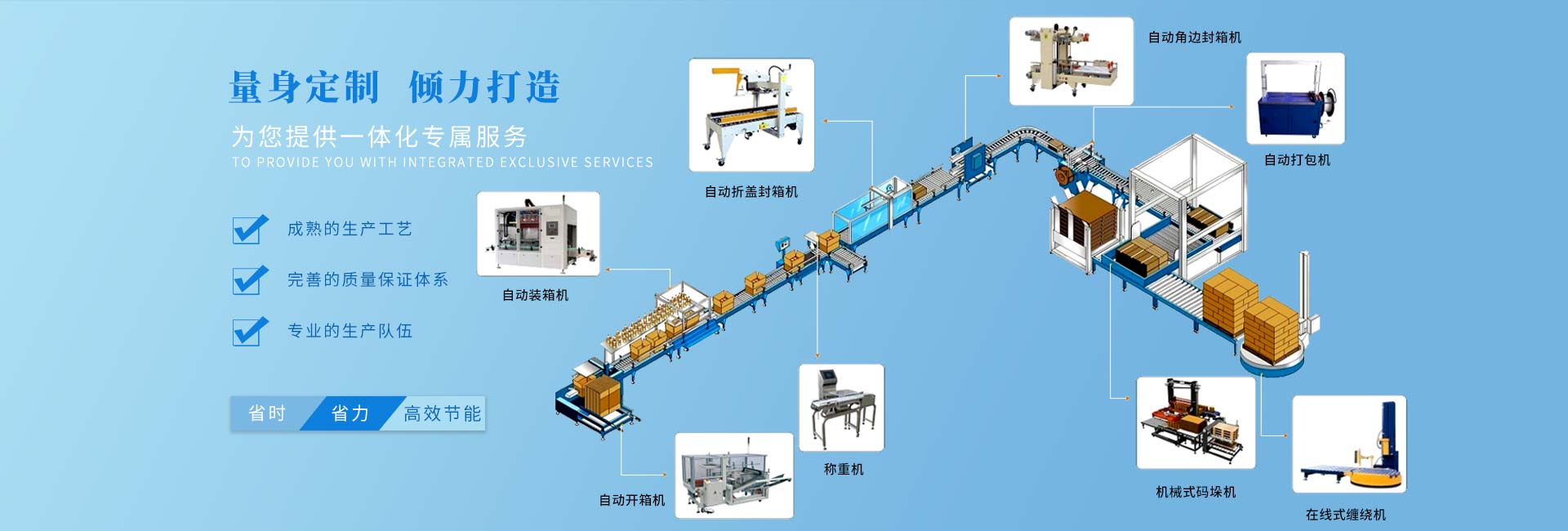



装卸机器人属于码垛机器人的一种,其可以实现准确拾放料作业。为了让大家能更好地了解这款产品,下面就简要介绍下其功能特点及主要应用领域。这种装卸机器人拥有操作速度快、有效载荷大、占地面积小等特点。
其中操作机的结构类型有水平关节型、直角坐标型、多关节型和圆柱坐标型等;控制器一般采用多CPU或多级计算机系统,实现运动控制和运动编程;装卸机器人末端执行器为适应不同的装配对象而设计成各种手爪和手腕等;传感系统又来获取装卸机器人与环境和装配对象之间相互作用的信息。






为了更多的让码垛机生产线正常运作,要给员工养成定期对生产线码垛机进行常规检修这样我们的生产才得以更好、更快的发展。我厂有多年的生产经验,现总结一下码垛机的系统维护要点希望对大家有所帮助。
1.电动机检修
1)故障:电动机无法启动
原因:
a)对应的空气开关跳闸。
b)空气开关损坏,输出三相电压不正常。
c)电机三相绕组不平衡,对地绝缘电阻不合格
d)交流接触器损坏(不吸合或输出缺相)。
e)如果是变频器控制电机或是伺服电机,变频器或伺服驱动器显示不正常、没有输出。
f)可编程控制器对应的输出点没有信号输出。
2)故障:电动机发热或有异常杂音
原因:
a)电源缺相。
b)电机三相绕组不平衡,线圈有局部短路现象。
c)外围负载范卡,抱死。
d)如果是闸式电动机,抱闸没松开,整流块和线圈损坏、刹车片有磨擦。
3)故障:闸式电动机刹车不及时
原因:
a)刹车片间隙不合适。
a)交流接触器线圈磁铁有油污,断开有延迟。
b)如果需要快速制动的闸式电机,接线不正确。
2.光电开关
故障:无信号
原因:
1)光电开关镜头表面不干净。
2)光电开关信号输出线没有信号。(如无信号更换开关);
3)光电开关信号输出线连接至可编程控制器信号线断路或虚接;
4)如果是反射板式光电开关,反射板表面不干净或位置有问题;
5)如果是对射式光电开关,发射端没有光源发出或位置有问题。
3.接近开关
故障:无信号
原因:
1)接近开关信号输出线没有信号。(如无信号更换开关);
2)接近开关信号输出线连接至可编程控制器信号线断路或虚接;
3)接近开关检测体距离接近开关太远。(应在3-7mm以内);

1.玉米糁码垛机结构非常简单,运行稳定,故障率低(人为除外),易于保养及维修;
2.玉米糁码垛机主机自动循环加油润滑,免人工维护;
3.玉米糁码垛机主机有三面可任意选择做进料、出料口,限度适应场地;
4.玉米糁码垛机采用伺服电机控制转袋、定位、托盘升降,运行平稳,度高,噪音小,解决了震动冲击问题,不再使用液压缸升降;
5.使用玉米糁码垛机可在触摸屏实现人机对话,全部操作可在控制柜屏幕上手触式完成,包括设置垛型、选择垛型,操作非常简单;码包样式可随意变换,多种垛型选择;五花垛、六顺垛,占用空间小于20平方米时可码直垛也可码五花垛,随意可调。
6.使用玉米糁码垛机垛型及码垛层数可任意设置,垛型整齐,方便储存与运输;
7.玉米糁码垛机码垛高度,速度可调,快可达6秒每袋,节约人工成本。可节约人工2—4人,且可两线并用一台主机;
8.自动进托、自动出垛、码包整齐比机械手好;
9.玉米糁码垛机不管是安装还是维修,都无需停产;相对而言机械手做不到,结构复杂程度是机械手的四分之一。



 在线客服
在线客服 13851918388
13851918388 183969645@qq.com
183969645@qq.com


